|
|||||||||
 |
☏ 0574-65358289 |
||||||||
|
|||||||||||||||
| 您现在的位置: 中国气动马达网 >> 气动马达信息 >> 气动行业资讯 >> 气动行业信息 >> 正文 |
行星摆线针轮传动机构优化设计原理 |
|
|
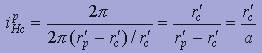
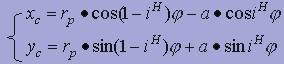
1.几何摆线和曲线方程 摆线针轮行星传动中,摆线轮齿廓曲线运用内啮合发生圆产生的短幅外摆线。这种摆线曲线的生成原理如图Fig14-1所示。 Fig.14-1 有一发生圆(滚圆)半径为rp',基圆半径为rc',基园内切于发生圆,当发生圆绕基圆作纯滚动,其圆心Op分别处于Op1、Op2、Op3、Op4、Op5、Op6......各位置时,由此固结在发生圆平面上的点M分别经过M1、M2、M3、M4、M5、M6......各位置,由此发生圆周期滚动,发生圆上点M所形成的轨迹曲线即为短幅外摆线。 由以上摆线生成的几何关系 若仍保持以上的内切滚动关系,将基圆和摆线视为刚体相对于发生圆运动,则形成了摆线图形相对发生圆圆心Op作行星方式的运动,这就是行星摆线传动机构的基本原理。其中存在如下关系: 中心距Op-Oc为 摆线刚体的自转相对的公转的转速比为 初始位置时,点M对于以Op为圆心的所在圆半径为rp,定义短幅系数为 在Xc-Oc-Yc座标系中,以转臂OcOp的转角φ为自变量,几何理论摆线的方程组为
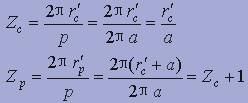
式中 运用如上摆线生成的原理来设计行星传动机构,就相似于渐开线齿轮的少齿差行星传动机构。从上述由滚圆生成曲线的过程的逆向思索,一个已有如上齿廓的摆线轮,其中心Oc绕被固定的中心Op作匀速运动,在以Op为圆心rp为半径的圆上找到一点M,并将M点固定在Op圆平面上,使摆线轮旋转时它的齿廓始终通过M点,由此,摆线轮必产生以Oc为中心的自转。其公转与自转的转速比为 2.摆线齿廓曲线应用与问题 (1)摆线齿廓曲线应用 从第1.章可知,由内啮合发生圆生成的短幅外摆线可以作为行星摆线传动的理论齿廓,但是实际传动啮合副必须要有足够的实体结构强度以保证传递动力,因此,由1.章中的方程组(1)给出的齿廓曲线和点针齿只是理论上的假设,实际的针齿半径为rrp,而实际的齿廓也发生变形,摆线齿廓曲线形成原理见下图(Fig.14-2)。 Fig.14-2 以理论几何摆线曲线上的任意点为圆心,以针齿半径rrp(直径drp)画出一系列等圆,由此一系列等圆所包络出来的内侧等距曲线可以作为摆线轮的齿廓。从摆线轮、针齿两者组成的啮合关系可知,基园与发生圆的切点始终是传动节点,而基园是摆线轮的节圆,发生圆是针轮的节圆。 摆线轮节圆上的分齿周节为: p = 2π(rp'-rc') = 2πa ; 按分齿周节进行分度,分别得到摆线齿数Zc和针齿数Zp:
可见用一个M点生成的短幅外摆线的完整齿数与同一个分度单位的针齿数只有一个齿差,这就是一齿差摆线针轮传动机构,见下图。 Fig.14-3 按图中关系,针齿在分布圆上的周节有以下关系:
根据内啮合行星机构传动关系,其传动比:
根据几何关系,可以推出齿廓曲线的方程为:
可见,以上得到的摆线齿廓曲线可以用来设计出完全与少齿差行星传动一样的机构。根据图Fig.14-2的齿廓形成原理,加工摆线轮时模拟图中关系确定产形参数进行展成法加工,可以得到符合上述方程组的齿廓曲线。 (2)工艺实施中的问题 但是上述只是在理论上提供形成实际摆线齿廓,制造一齿差行星传动机构的一种可能,在实际生产和产品使用中存在着不可回避的问题:
由于以上数学关系的复杂性,要解决上述问题依靠人工智能进行计算几乎不可能,只有依靠计算机程序进行技术上的优化处理方能得到解决。 3.摆线轮实际齿廓曲线与数学表达 为了造成摆线针轮啮合副的装配间隙和所需的润滑间隙,需要采取实际齿廓的修形。众所周知,渐开线齿轮在范成发加工时,只要保证产形刀具的原始齿廓参数不变,就可以采取变位的方法来控制加工即能得到共轭齿廓的目的,这是因为原始齿廓被视为曲率半径无穷大的直线齿廓展成的。但是,摆线齿廓却不同,用特定半径圆弧的环面磨轮进行展法加工时就造成2.章涉及的问题。 承认摆线针轮啮合所需的间隙是客观必需的,实际齿廓必然存在与理论齿廓的修形误差。实际加工对齿廓修形的方法可归总如下: 1)转角修形:对加工好的标准齿廓摆线轮,将分度机构调整一个微量角度的补偿量,再磨出全部齿面,得到修形齿廓,转角修形量表示为δ。所得到的曲线形状是符合理论齿廓的共轭曲线,但没有径向间隙。 从误差的角度出发,这也相当于摆线轮的分度误差造成的齿形差异。 2)移距修形:磨齿时磨轮相对工作台中心径向移动一个微量位移,移距量表示为Δrp,得到比较大的径向间隙和比较小的侧间隙,但是破坏了齿廓的共轭特性。 从误差的角度出发,就相当于针齿分布圆半径的变动误差造成的齿形差异。 3)等距修形:磨齿时将圆弧环面磨轮的圆弧半径改变一个微量值,等距修形量表示为Δrrp,使径向间隙和侧间隙相等。但是也破坏了齿廓的共轭特性。 从误差的角度出发,就相当于原始齿廓误差造成齿厚减薄(或增厚)。 分别用这三种单一修形方法的齿形几何关系如图Fig.14-4.
Fig.14-4 考虑以上各修形量的存在,实际齿廓曲线方程组变成如下形式:
(5) 式中:
4.优化齿廓修形量的目的和步骤 1)优化齿廓修形量的目的 为了控制摆线针轮传动的有效啮合间隙,使其符合摆线传动的精度,传动能力达到设计要求,必须考虑包括各个修形量在内的几何计算,并计算假定一定啮合齿数时使间隙在各啮合齿间分配和针齿弹性变形的匹配,以造成多齿承担受力,提高机构的承载能力。这就是对设计摆线针轮机构进行优化计算的目的。 当然,与此有关的输入输出机构的合理强度分配也是不可忽视的,尤其对于柱销式的浮动输出机构。 这一优化设计目的也就是为了解决2.章所分析的实际摆线齿廓与理论齿廓差异存在的各大问题,使设计的机构在制造中得到最优控制,实现设计目的。但是运用实际齿廓方程组(5)并同时考虑针齿受力、变形、间隙分配的计算及其最优化,计算过程将极其复杂,依靠人工智能是无法解决的,必须运用计算机程序才能进行此项工作。 计算机优化设计计算程序能达到以下实现目的:
2)齿形优化计算的概略步骤 按照行星摆线传动啮合齿形优化设计的目的,本计算机程序的基本计算步骤如下:
Fig.14-5 5.用计算机程序实现优化设计 根据3.章中给出的实际摆线齿廓方程组(5)和5.章所述的摆线齿廓优化设计目的与步骤,《Wheel齿轮设计计算系列程序》在“动轴传动齿轮对”主菜单项中给出了“一齿差行星摆线传动......”设计计算程序。有关该程序的操作界面和执行事项请参阅“一齿差行星摆线传动设计计算”说明。 此程序项以一组特性对话框的形式提供逐项计算,共六各对话框页,分别为:“预定参数”、“传动零件设计”、“间隙和转角修形量”、“优化修形量”、“棒测量”和“强度校核”等。 必须注意:该程序是针对目前最流行的双摆线轮行星机构进行设计计算的,其计算结果必须用于双摆线轮行星机构。因为到目前为止,双摆线轮仍然被公认为这是最合理的机构组合。当然,单行星轮或多行星轮机构在理论上都是成立的结构方案。但是,从实际结构设计上,单行星轮机构显然不能体现机构的小型化,而多行星轮机构到目前为止仍然没有对偏心轴设计和机构的可装配性作出解决方案。所以,作为优化设计程序,选择最合理的机构进行计算是可以理解的事。 1)计算程序项介绍: 预定参数:首先确定摆线轮齿数Zc、针齿数Zp、(传动比i)、传动功率P和输入转速n0、(输出扭矩Tc)等传动参数,并对所设计机构的传动效率给以数步设定。其次根据程序推荐预定短幅系数K1、针径系数K2、齿宽bc、针齿圆半径rp、针齿套半径(针齿作用半径)rrp和偏心距(摆线轮自转中心的回转半径)a 。 其中 针径系数 传动零件设计:此项子程序根据摆线针轮预定参数,推算出摆线轮的齿根圆和齿顶圆的直径,并根据传动预定参数推荐选用GB284标准无外圈短圆柱滚子轴承的摆线轮内孔。由此根据摆线轮的结构对输出机构注销组进行优化设计,如果输出机构的受力注销数和注销的弯曲强度安全系数足够,则输出机构被确定。 输出机构的结构与受力分析如图Fig.14-6与图Fig.14-7. Fig.14-6 柱销式否浮动输出机构 Fig.14-7 注销受力情况 间隙和转角修形量:此项子程序选定所需的润滑间隙和可能影响装配间隙的摆线轮制造误差,确定摆线齿廓的侧间隙和径向间隙值,并计算出达到侧间隙所需要的转角修形量。注意:求出的转角修形量只是为求出相应的转角修形齿廓作为优化目标,而实际计算结果不使用这个修形量。 优化修形量:此项子程序利用以上得到的各项准备数据,很方便的的计算出所需要的正等距和正移距修形量的优化值,并报告了正等距加正移距修形齿廓与优化目标(转角修形齿廓)的平均差距。 程序操作虽然极其方便,只要点击计算按钮即可完成计算,但是计算机却对计算过程作了极其复杂的条件极值数据逼近处理,这是人工智能所不能完成的。 确认计算结果后,输出理论正确齿廓、转角修形齿廓和优化修形齿廓的坐标数据,分别储存以*.DDA(理论正确齿廓和转角修形齿廓)和*.MDA(正等距加正移距优化修形齿廓)文件。 说明:等距修形量以加大磨轮的环面圆弧半径为正,即Δrrp>0;移距修形量以磨轮中心远离摆线轮中心为正,即Δrp>0. 棒测量:对于优化设计的摆线轮参数和修形量参数决定的实际齿廓,计算在齿廓线的拐点附近贴切的圆棒测量的测量数据,用于加工过程的测量控制。此项子程序确定:符合在拐点附近贴切的量棒半径Rt,在齿间的量棒中心所在圆的半径RL,给定跨测齿数的测量跨距等测量参数。同时也可以利用这些数据和齿廓坐标数据在AutoCAD中绘制测量示图,在设计图样或检验文件中表达测量要求。测量图可参见对话框页说明中的Fig.13-8。 注意:之所以在拐点附近计算棒测量数据,其主要理由有:
因此,在计算过程中圆整量棒半径时,请注意不能把计算值变动太大。 强度校核:此项子程序对所设计的摆线针轮传动啮合副的最大作用力、针齿销变形量、啮合齿数、接触应力幅、弯曲应力幅进行计算,并对接触和弯曲疲劳强度的安全系数进行校核。 2)有关计算方法的说明: a.转角修形齿廓曲线方程组: 根据摆线轮和针齿组制造误差,以及必须保证的啮合间隙,换算出所需的侧间隙Δc,由侧间隙换算出所需的转角修形量δ,在方程组(5)中并令Δrp=Δrrp=0,,即得到转角修形齿廓得方程组为:
b.等距加移距修形齿廓曲线方程组: 若以给出径向间隙Δj,正等距修形量Δrrp和正移距修形量Δrp,而转角修形量δ=0,且Δrp=Δrrp-Δj,则等距加移距修形齿廓曲线方程组为:
c.关于优化修形量: 对于φ=φi,转角修形齿廓曲线上的点Pi(xi,yi)由方程组(6)求得,正等距加正移距修形的齿廓曲线上的点Pi'(xi',yi'),则两曲线上的对应点的距离为
两曲线上所有对应点的距离平均值为
若以转角修形齿廓为优化目标,使正等距加正移距修形齿廓向转角修形齿廓逼近,即
由此求得的Δrp、Δrrp为优化修形量。 d.啮合间隙在各齿间的分配: 由于修形量Δrp和Δrrp,若不考虑弹性变形,针齿与摆线齿不能多次同时啮合,当相角φ0=arccosK1处第一齿进入啮合,则φi=i×2π/Zc位置的啮合间隙分配为
c.针齿销的弹性变形: 由于针齿销的弹性变形(且忽略接触变形和其它弹性变形)机构中有若干个齿同时啮合,设其中一齿的最大变形量(弯曲挠度)为δmax,各啮合齿的弹性变形量为
d.关于啮合齿数: 由于间隙的存在,使针齿与摆线轮不能保证多齿啮合,而由于啮合副弹性变形,在适当的间隙存在的情况下能够实现多齿啮合,但不能保证理论上认定的(Zc-1)/2个齿啮合。实际啮合齿数由实际间隙和弹性变形两者相互作用结果决定。由(8)式和(9)式的分配关系如下图Fig.14-8. Fig.14-8 由图Fig.14-8可知只有在φm~φn范围内啮合副的弹性变形大于分配的齿间间隙,因此在此相位角内的各齿同时啮合。则啮合齿数 Zn= e.关于啮合副最大变形量δmax: 啮合副最大变形量在最大正压力作用下发生,包括针齿销的弯曲挠度fmax和接触点的接触变形量wmax。 δmax=fmax+wmax ; 对于两支点结构的针齿销(见图Fig.13-4),它的弯曲变形挠度为:
对于三支点结构的针齿销(见图Fig.13-4),它的弯曲变形挠度为:
式中:Fmax― 最大正压力; L―针齿销支承跨距; E―啮合副材料弹性模量; J―针齿销截面模量, 啮合副最大接触变形量为:
式中: μ―啮合副材料的泊桑比; ρ―最大受力啮合点(φ0=arccosK1)处的齿廓曲率半径, bc―摆线轮宽度; f.关于最大正压力Fmax: 最大作用力处使啮合副产生最大变形δmax,从而补偿齿间隙使形成多齿啮合。然而最大正压力又决定于啮合齿数,因而最大正压力为:
式中:Tc― 单个摆线轮上的作用扭矩,为考虑双摆线轮传动的安全裕度,取Tc=1.1Tout/2 ; li―各啮合齿上作用力对摆线轮中心的力臂; rc'―摆线轮节圆半径,根据以上几何关系,rc'=aZc ; Δφi―各啮合此间分配的间隙。 
|
|
相关文章 |
最新推荐 |
最新热点 |
||||||||
|
能源化工行业对国产气动阀门 气动工具的特点(与电动工具 海西气动城 2014全球模具展览会列表 气动工具发展受重视 发展趋势 气动五金工具各部分功能 国内五金气动工具规模逐渐扩 液压与气压传动发展及现状 气动液压电动泵的适用液体的 宁波奉化气动元件出口占全国 |
|
|
| | 设为首页 | 加入收藏 | 联系站长 | 网站导航 | | |||
|
 ;
; (1)
(1)  ; (2)
; (2) 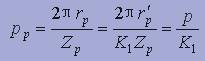 ;
;  (3)
(3)  (4)
(4) 
 (6)
(6)  (7)
(7)  ; (8)
; (8)  ; (9)
; (9)  ;
; ;
; ;
; ;
;