|
|||||||||
 |
☏ 0574-65358289 |
||||||||
|
|||||||||||||||
| 您现在的位置: 中国气动马达网 >> 气动马达信息 >> 气动马达技术 >> 其它气动技术信息 >> 正文 |
气动比例阀控系统摩擦力补偿及仿真研究 |
|
|
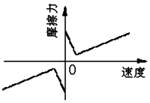
在气动比例位置控制系统中,系统低速运行时会出现不平稳的现象,这会影响系统的正常工作,降低系统的定位精度[1]。这主要是因为系统中比例阀和气缸存在着静、动摩擦力等非线性特性。系统在低速运行时具有如图1所示的摩擦特性曲线,从控制理论上分析,这一现象将产生一个正反馈,从而引起系统不稳定(爬行)。
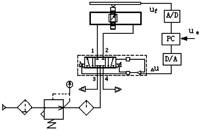
1 .气动比例系统摩擦力特性及补偿分析 理想的摩擦补偿是在控制信号的变化方向上叠加脉冲信号的函数,每个脉冲都有足够的能量以消除静态摩擦。如果能量过小,阀会处于锁紧状态。如果能量过大,阀的滑动量就会超过所需的范围。 2 .实验系统组成和原理 气缸采用DGPL-25-500-PPV- A-GF-B型无杆气缸,是系统的被控对象,目的是实现活塞位移按给定规律变化。传感器为MLO-POT-500-TLF型电位计式模拟位移传感器,是系统的反馈检测元件,在线检测活塞位移,输出电压随测量位置在0~10V之间连续变化。比例阀采用MPYE-5-1/8-010B型3位5通比例阀,作用是把电信号转化为气动信号,驱动气缸活塞动作。A/D、D/A转换由HY-6070通用数据采集控制板完成。 实验系统的工作原理:通过计算机软件对比例阀、无杆气缸的控制调节作用,使输入电压信号与气缸位移反馈信号(与气缸位移是线性关系)之差减小并趋于零,从而实现气缸位移对输入信号的跟踪。
本文中所使用的摩擦补偿信号是由一系列低幅高频脉冲信号组成。摩擦力补偿的原理如图3所示,在控制信号变化率方向上,对控制信号叠加一短脉冲。只要误差非零,信号就会不断发生变化。加在比例阀上的压力就会不断变化,直到阀开始滑动。
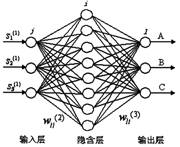
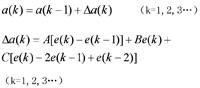
图4 用于自学习的BP网络结构示意图 控制信号由两部分组成:
a 为变量,通过BP网络自学习计算得到。BP网络结构如图4所示,采用3×8×3的结构。
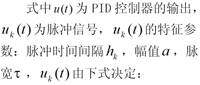
其中A、B、C的值为BP网络的输出。为系统对控制信号的跟踪误差;目的是通过在线调节补偿值,使性能指标函数极小化,其中,为输入,为系统输出。 3 .幅值、脉宽和脉冲间隔的确定 当阀滑动时,输入的能量不能太大,这一点非常重要。因此,脉冲信号的脉宽应该较小。在实际应用中,不应小于采样周期,可以为一个或多个采样周期,可调。本研究取=1.5,采样周期为定位时间的1/120。 脉冲信号的时间间隔应比控制器的采样时间间隔大,也要大于脉宽。本文将脉冲间隔和脉宽联系起来。取为,其中2≤≤5,这里取n=4。 4 .仿真研究
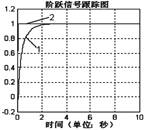
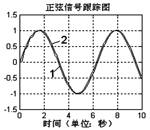
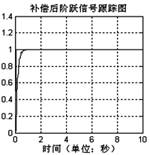
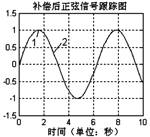
从图中可以看出,摩擦力补偿前,系统响应速度比较慢,定位误差较大,特别是正弦信号,而补偿后系统调节时间明显缩短,定位误差很小,理想曲线和仿真曲线几乎重合。这说明采用该补偿方法是可行的。
5. 结论 
|
|
| | 设为首页 | 加入收藏 | 联系站长 | 网站导航 | | |||
|