|
|||||||||
 |
☏ 0574-65358289 |
||||||||
|
|||||||||||||||
| 您现在的位置: 中国气动马达网 >> 气动马达信息 >> 马达技术 >> 正文 |
气动机械手气压传动系统 |
|
|
如图16-1是用于某专用设备上的气动机械手的结构示意图,它由四个气缸组成,可在三个坐标内工作,图中A为夹紧缸,其活塞退回时夹紧工件,活塞杆伸出时松开工件。B缸为长臂伸缩缸,可实现伸出和缩回动作。C缸为立柱升降缸。D缸为回转缸,该气缸有两个活塞,分别装在带齿条的活塞杆两头,齿条的往复运动带动立柱上的齿轮旋转,从而实现立柱及长臂的回转。
一、工作程序图 该气动机械手的控制要求是:手动启动后,能从第一个动作开始自动延续到最后一个动作。其要求的动作顺序为:
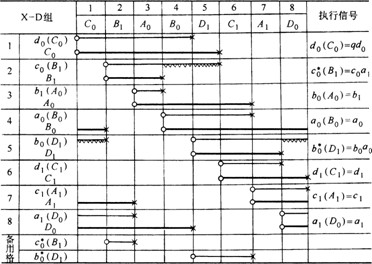
二、X-D线图 根据上述分析的可以画出气动机械手在动作程序下的X―D线图,从图中可以比较容易地看出其原始信号c0和b0均为障碍信号,因而必须排除。为了减少整个气动系统中元件的数量,这两个障碍信号都采用逻辑回路来排除,其消障后的执行信号分别为
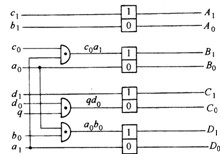
图 16-2 气动机械手X-D线图 三、逻辑原理图 图16-3为气动机械手在其程序为
图16-3 气控逻辑原理图 由该系统图分析可知,当按下启动阀 后,主控阀 将处于 位,活塞杆退回,即得到 ; 将使主控阀 处于 位,活塞杆伸出,得到 ;活塞杆伸出碰到 ,则控制气使主控阀 处于 位,缸活塞退回,即得到 ; 缸活塞杆挡铁碰到 , 又使主控阀 处于 位, 缸活塞缸返回,即得到 ; 缸活塞杆挡块又压下 , 又使主控阀 处于 位,使 缸活塞杆往右运动,得到 ; 缸活塞杆上的挡铁压下 , 则使主控阀 处于 位,使 缸活塞杆伸出,得到 , 的活塞杆上挡铁又压下 ,则 使主控缸 处于 位, 缸活塞杆伸出,即得到 ; 缸活塞杆上的挡铁压下 , 使主控阀 处于 位,使 缸活塞杆往左,即得 ,D缸活塞上的挡铁压下 , 经启动阀又使主控阀 处于 位,又开始新的一轮工作循环 
|
|
| | 设为首页 | 加入收藏 | 联系站长 | 网站导航 | | |||
|